Гидроакустический метод количественной оценки водных биомасс базируется на следующем наборе допущений,
параметров и методов их идентификации:
Состояние акустического поля в упругой водной среде описывается зависимостью давления от координат места и времени в
виде дифференциального уравнения в частных производных:
где:
p - давление звука в точке (x, y, z) в момент времени t,
c - скорость звука.
Использование приведенного строгого уравнения и расчеты по нему затруднены недостаточностью информации о фактических
параметрах среды.
На практике, по аналогии с геометрической оптикой, для описания состояния поля в точках пространства
и времени, используются методы лучевой акустики, подразумевающие игнорирование информации о фазе акустической волны,
значительное превышение размеров рассеивателей над длиной акустической волны и отсутствие значимых изменений
характеристик среды на длине волны.
Гидроакустический метод оценки водных биомасс является вариантом обратной задачи рассеяния.
Общая теория обратной задачи рассеяния описывает эхосигнал исключительно как совместный результат отражательной
способности цели, её нахождения в пространстве и потерь звука на распространение. Имея информацию только в виде
принятой звуковой волны с известной интенсивностью (давлением), эта задача не имеет однозначного решения, так как,
одна и та же форма эхосигнала может быть образована разными составами рассеивателей.
Определение плотности зарегистрированных объектов, как решение обратной задачи рассеяния в гидроакустическом методе
количественной оценки водных биомасс, всегда требует дополнительной информации о зарегистрированных рассеивателях.
Для учета потерь интенсивности звуковой волны при её распространении применяется модель сферической волны с учетом
фактора затухания.
На относительно небольших дистанциях, на которых происходит гидроакустическая оценка водных
биомасс, и при недостаточности знаний о специфических условиях распространения звука в конкретных обстоятельствах,
считается вполне допустимым учет потерь на распространение и затухание ультразвука в воде для сферического фронта
распространяющейся волны по формуле: ПР=20LgR+aR, где:
ПР - потери интенсивности распространяющейся звуковой волны,
R - пройденное волной расстояние, м, a - коэффициент затухания, дБ/м.
В промысловой гидроакустике потери интенсивности эхосигнала от одиночных целей определяются по формуле: ПР=40LgR+aR, а для групповых целей по формуле: ПР=40LgR+aR.
Селекция эхосигналов от одиночных и групповых целей производится по критерию соответствия длительности эхосигнала
и длительности генерируемой посылки эхолота.
Распределение вероятностей амплитуд зарегистрированных одиночных эхосигналов есть результат свертки вероятностей:
где:
We(y) - плотность распределения вероятностей амплитуд зарегистрированных одиночных сигналов;
Wt(x) - плотность распределение вероятностей регистрации цели под определенным углом обнаружения;
Wf(y - x) - искомая плотность распределения вероятностей отражательной способности одиночных целей.
В численном решении приведенного выражения используется кусочно-линейная аппроксимации функции распределения
амплитуд и характеристики направленности применяемой антенны.
Зависимость энергии эхосигнала от плотности рассеивателей линейна при условии случайного распределения
рассеивателей в озвученном объеме:
где:
E - средняя энергия эхосигнала;
n - число рассеивателей в озвученном объеме;
e - средняя энергия эхосигнала от единичного рассеивателя.
Линейная зависимость применима только при выполнении условий релеевского рассеяния в озвученном объеме,
при котором функция распределения вероятностей значений интенсивности определена выражением:
где:
I - математическое ожидание интенсивности эхосигнала.
Напряжение на клеммах гидроакустического преобразователя прямо пропорционально звуковому давлению падающей волны.
Энергия эхосигнала прямо пропорциональна интенсивности эхосигнала, или квадрату его среднеквадратичного давления,
или квадрату напряжения на клеммах антенны, мерой энергии эхосигнала служит интеграл вида:
Физический смысл пределов интегрирования – верхний и нижний границы слоя интегрирования, причем нижняя граница слоя
может быть переменной от посылки к посылки эхолота и определяется положением дна.
На практике, указанный интеграл накапливается за ряд циклов прием – передача (посылок эхолота) и его среднее значение
определяется формулой:
где:
E - интеграл эхосигнала по формуле выше;
N - число посылок эхолота.
Тогда для плотности рассеивателей, образующих интегрируемый эхосигнал, справедливо следующее выражение, известное
как уравнение интегрирования:
где:
p - средняя плотность рассеивателей в интервале накопления;
C - калибровочная постоянная, зависящая от чувствительности акустического преобразователя и сквозного
усиления аналоговых трактов эхолота и интегратора;
g - ошибка компенсации потерь интенсивности на распространение и затухание звука при его распространении;
E - среднее накопление интеграла по формуле выше;
d - среднее значение сечения обратного рассеяния объектов, образующих интегрируемый сигнал;
F - интегральный фактор направленности антенны, идеализированное представление характеристики
направленности в виде телесного угла, в пределах которого, интегрирование эхосигнала даст тот же результат, что и в
пределах реальной пространственной характеристики направленности, при условии случайного распределения
рассеивателей в озвученном объеме:
где:
a и f - азимутальный и орбитарный углы;
F - интегральный фактор направленности, стерадиан.
Восстановление распределения отражательной способности зарегистрированных одиночных целей производится непрямым
модифицированным методом Крейга-Форбса с использование кусочно-линейных аппроксимаций входного распределения
амплитуд, характеристики направленности антенны и искомого распределения отражательной способности.
Полученное решение используется для определения искомой плотности через представление формулы интегрирования 7 в виде:
где:
p - средняя, в интервале усреднения, плотность оцениваемых объектов;
SA - средняя, в интервале усреднения, сила поверхностного обратного рассеяния;
TS - средняя, в интервале усреднения, сила цели объектов оцениваемого скопления.
Средняя, в интервале усреднения, сила поверхностного обратного рассеяния определяется по формуле:
где:
E - среднее, в интервале усреднения, накопление интегратора по формуле 7;
Cea - электроакустическая постоянная системы, параметр модели, определяется специализированной
гидроакустической калибровкой по эталонной цели;
F - интегральный фактор направленности антенны по формуле 7.
Непосредственным результатом количественной оценки плотности водных биомасс гидроакустическим методом являются
пространственно распределенные относительные значения плотности оцениваемых гидробионтов p(x, y).
Абсолютная численность (биомасса) может быть восстановлена вычислением интеграла:
где:
Q - абсолютное значение численности или биомассы в экземплярах или килограммах;
p(x, y) - функция, определяющая значение плотности в декартовых координатах.
На практике выполняется численное интегрирование через использование интерполированных в узлы регулярной
двухмерной координатной решетки пространственно распределенных значений плотности:
где:
Q - абсолютное значение численности или биомассы;
p(x, y) - значение плотности в координатах x, y a1, a2 - значения интервалов между узлами решетки;
p1, p2 - целочисленные индексы, нумерация которых зависит от координат начальной
точки x0, y0.
Парадигмой количественной оценки гидробионтов на водотоке принято измерение временных параметров плотности
потока рыб, пересекающих, в своем естественном движении, неподвижную зону гидроакустической регистрации,
с последующим восстановлением искомой численности интегрированием по времени наблюдения и по числу регистраторов:
где
Q - численность,
p(x, t) - значение плотности потока в координатах сечения реки x и времени t.
Индексы у кратного интеграла обозначают интегрирование за время наблюдения по наблюдаемому сечению водотока.
В виде допущения принята стационарность потока рыб через наблюдаемое сечение. Под стационарностью потока здесь
понимается статистически значимая однонаправленность движения оцениваемых объектов.
Другими словами – однажды прошедший через зону гидроакустической регистрации и зарегистрированный объект не
возвращается, по крайней мере - за время наблюдения, тем самым обеспечивается отсутствие кратности его регистрации. К
примеру, указанное допущение реализовано в известных конструкциях рыбоучетных заграждений, где невозвращение рыбы
после её регистрации впропускном устройстве обеспечивается механическим способом.
В широко используемом гидроакустическом методе количественной оценки гидробионтов в варианте вертикальной локации
парадигмой является измерение пространственных параметров плотности поля рыбных скоплений, с последующим
восстановлением искомой численности интегрированием по обследованной акватории по формуле 9.
Так же принято допущение, известное как допущение стационарности поля плотности рыбных скоплений. Под стационарностью
здесь понимается статистически значимая неизменность статистических характеристик восстанавливаемого поля плотности.
Иными словами – отсутствие значимого перемещения регистрируемых скоплений по обследуемой акватории. По крайней мере за
время проведения съемки.
Используя указанные выше аналогии и принцип относительности движения, представляется обоснованным использование
методического и математического аппарата гидроакустического метода количественной оценки гидробионтов в варианте
вертикальной локации в количественной оценке проходящих рыб на водотоке.
Математическое обеспечение комплекса “NetCor” позволяет производить количественную интерпретацию полученных
гидроакустических регистраций проходящих рыб двумя способами – эхосчетом и эхоинтегрированием.
Эхосчет применим для оценки разреженных потоков, в условиях, так называемой, разрешаемой регистрации отдельных рыб.
Дальнейшая обработка подобных регистраций заключается в цифровой фильтрации (фильтр низких частот) и в процедуре
объединения следов рыбы с использованием элементов кластерного анализа по признаку близости. Выделенные таким
образом следы регистрации проходящих одиночных рыб поддаются эхосчету с восстановлением распределения силы цели и
направления движения рыбы в градациях вверх – вниз по течению относительно неподвижного регистратора.
Для плотных потоков используется эхоинтегрирование, краткая теория которого приведена здесь.
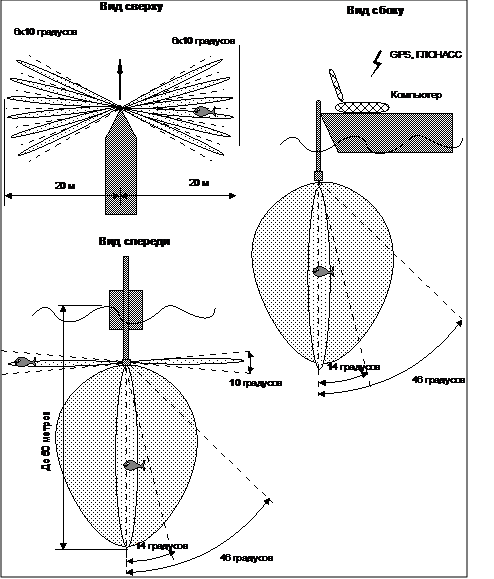
Траверсная гидролокация
При использовании сканирующих гидроакустических приборов дистанционная размерная классификация гидробионтов осуществляется путем излучения акустической энергии широким лучом (пучком)
в плоскости, перпендикулярной направлению движения судна, прием производится узким лучом (пучком),
сканирующим в пределах указанного широкого луча. При этом, выделение максимального уровня амплитуды эхосигналов от отдельно разрешаемых гидробионтов производится путем сравнения
последовательных выборок уровней эхосигналов в каждом такте электронного поперечного сканирования за n циклов лоцирования от начала и до окончания эхоконтактов с объектами при движении судна.
Функционально измеритель, использующий секторный сканирующий гидролокатор (эхолот) по сути, является третьей реализацией прямого метода дистанционного определения размерного состава гидробионтов,
так как он обеспечивает возможность измерения уровней эхосигналов от цели, находящейся на оси диаграммы направленности приемной антенны.
Анализ известных технических решений в данной области техники позволяет сделать вывод о том, что в настоящее время этот метод является единственно возможным для определения силы цели рыб "in situ"
(и соответственно размерного состава) в условиях мелководий с глубинами менее 3 м.
Реализация этого метода осуществляется следующим образом. При движении судна пространство водной акватории последовательно озвучивается широким лучом (пучком) в поперечной плоскости
относительно направления перемещения. Узкая приемная характеристика направленности с высокой скоростью (до нескольких кГц или более) электронным способом сканирует в пределах указанного
широкого луча (пучка). В каждом такте сканирования запоминаются амплитудные значения принимаемых эхосигналов от отдельных гидробионтов.
В результате за один цикл лоцирования может быть получено m максимальных выборок эхосигналов от m отдельно разрешаемых объектов. В следующем цикле лоцирования выборки амплитуд эхосигналов,
от обнаруженных объектов, соответствующим образом сравниваются с предыдущими значениями, и в блоке памяти остаются лишь максимальные значения амплитуд из m сравниваемых. Далее циклы повторяются.
Таким образом, в процессе движения судна (от цикла к циклу лоцирования и от такта к такту сканирования) осуществляется отбор наибольших значений эхосигналов от отдельно разрешаемых рыб,
попавших в зону зондирования широкого луча (пучка) . Запомненные амплитуды пересчитываются в значения силы цели рыб TS , относительно амплитуд эхосигналов от образцовой сферы,
полученных при градуировке аппаратуры. По полученным значениям TS рыб рассчитываются размеры рыб с использованием известных эмпирических формул.
Количество учитываемых циклов лоцирования и тактов сканирования при анализе отсчетов от данной цели определяется продолжительностью эхоконтактов с нею.
Преимущество описанного способа, по сравнению с ранее известными, заключается в том, что существенно более широкая зона одновременного обзора позволяет значительно быстрее набрать
необходимую статистику эхосигналов от отдельных объектов различных размеров для определения репрезентативного размерного распределения (ряда) рыб в скоплении.
Более высокая скорость набора статистически значимых результатов измерений способствует повышению точности оценки размерного состава обнаруженных рыбных скоплений для ситуаций с ограниченными
возможностями по продолжительности проведения съемок. В результате непрерывного набора материалов за определенные промежутки времени и пространства,
возможно использование полученных данных о размерном составе скоплений для дифференциации скоплений по видам.
Направление, в котором обнаруживается максимальный сигнал от данной цели, находится из последовательности отсчетов огибающей, полученной за ряд циклов лоцирования и тактов сканирования.
Выделение отсчетов, принадлежащих отдельным целям, осуществляется автоматически с записью амплитуды, времени регистрации и расстояния до цели в файл памяти компьютера для последующего анализа
размерного распределения рыб в водоеме (или его участке). В качестве критериев для селекции сигналов используются амплитудно-временные характеристики полученных серий отсчетов.
Уровень принимаемого сигнала от рыбы зависит от характеристик рассеяния рыбы, ее местоположения в акустическом луче и электро-акустических параметров аппаратуры.
Если сигналы усиливаются с ВАРУ по закону 40 lg r + 2 ar, где r - расстояние до цели, a - коэффициент затухания звука в воде, то уровень амплитуды принимаемого сигнала:
где
U - уровень амплитуды эхосигнала, Gизл , Gпр , Gр - соответственно функции направленности излучения, приема и рассеяния рыбы по звуковому давлению,
- акустическое сечение обратного рассеяния одиночной рыбы, находящейся на акустической оси антенны при облучении со стороны спины,
С - электроакустическая постоянная аппаратуры, определяемая в результате градуировки аппаратуры с использованием образцовой сферы.
В процессе анализа поступающей информации каждому зарегистрированному отдельному объекту присваивается максимальный отсчет амплитуды Uijk , где I - номер цикла лоцирования,
j - номер положения сканирующего луча в пространстве, k - номер такта сканирования и глубина.
Для максимальных отсчетов амплитуды можно принять:Gизл = Gпр = 1 , т.е. объект локации находится на оси характеристики направленности антенны:
Под Gpj понимается усредненная по всем азимутальным углам функция направленности рассеяния рыбы, зависящая от угла облучения. В данном случае зависимость функции направленности от угла облучения
указывается индексом j , определяющим положение сканирующего луча в обследованном секторе.
Значения Gpj могут быть найдены на основе сопоставлений усредненных уровней эхосигналов для соответствующих направлений сканирующего луча в генеральной совокупности отсчетов.
Точность измерения максимальных уровней сигнала зависит от многих факторов, в том числе, от скорости судна Vс , частоты следования импульсов зондирования f ,
скорости сканирования приемного луча w и частоты преобразования сигнала в цифровом виде F. В метрологических измерениях принято считать, что для достоверной оценки энергетической характеристики эхосигнала
достаточно иметь порядка 10 отсчетов исследуемых импульсов. Учитывая, что длительность импульса от одиночной цели соизмерима с длительностью импульса зондирования t ,
требуемая частота преобразования F1 = 10/ r. Формула справедлива для традиционного однолучевого эхолота. В случае использования сканирующей системы (эхолота или гидролокатора) частота
преобразования должна быть увеличена в n раз: F1 = 10 n / r, где n - число отсчетов в одном такте сканирования. Если сканирование производится без наложения зон действия приемной антенны для
предыдущего и последующих отсчетов (без перекрытия), то n = Qизл / ?Qпр, где Qизл и ?Qпр - ширина характеристики направленности антенн в плоскости, перпендикулярной продольной оси судна,
соответственно в режиме излучения и приема на уровне - 3 дБ по давлению.В случае использования наложения (перекрытия) зон действия приемной антенны для предыдущего и последующих отсчетов,
число отсчетов в одном такте сканирования составит n = Qизл / Q'пр (1- Kп), где Kп - степень перекрытия зон, 0 < Kп < 1. Для уверенной селекции сигналов необходимо получить отклик от отдельной
цели на протяжении как минимум 5 циклов лоцирования. Чтобы это требование удовлетворялось, должно выполняться условие: 2 r tg (Q/2) = 5 Vc / f, где r - дистанция до цели, м; Q - ширина характеристики
направленности в плоскости параллельной продольной оси судна, на уровне - 3 дБ по давлению, градус; Vc - скорость судна, м/с; f - частота следования импульсов зондирования, 1/с.
В плоскости сканирования аналогичное условие выполняется, если 2 tg Qп /2 = 5 w/F , где w - круговая скорость сканирования, рад/с. При подстановке значений электроакустических параметров
сканирующего гидролокатора "PanCor" и однолучевого научного эхолота комплекса "Аскор" в вышеприведенные формулы можно судить о том,
что производительность сканирующих систем в 7 - 10 раз выше. Кроме того, возможность размерной классификации рыб в мелководных водоемах, с глубинами менее 5 м.,
возможно только с использованием сканирующего гидролокатора как в режиме горизонтального, так вертикального сканирований.
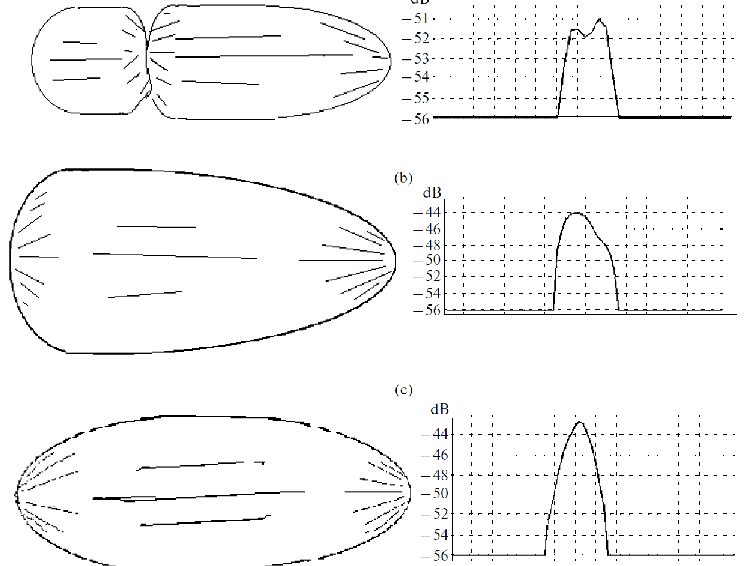
Видовое распознавание
Видовое распознавание основывается на связи между формой эхосигнала и конструкцией плавательного пузыря рыбы.Двукамерный пузырь (карповые) дает двухмодальный эхосигнал, асимметричный пузырь
(окуневые) дает асимметричный сигнал, симметричный пузырь (сиговые) дает симметричный сигнал. Для восстановления формы сигнала используется повышенная частота выборки АЦП.